
Modelagem Dinâmica e Controle de Veículos Subaquáticos não Tripulados
A equipe do NuMA vem pesquisando o assunto dinâmica e controle de veículos subaquáticos há seis anos, embora em modelagem dinâmica e controle, de uma forma geral, a experiência de trabalho é de aproximadamente vinte anos. Já foram orientadas três dissertações de mestrado sobre o tema no Programa de Pós-Graduação em Engenharia Oceânica da FURG e existem mais duas dissertações sobre o assunto em andamento, sendo uma delas no Programa de Modelagem Computacional. Um primeiro protótipo de um veículo do tipo rov (Remotely Operated Vehicle) já foi desenvolvido pelo NuMA, em projetos com apoios de CNPq e FAPERGS. Este veículo pode ser visto na Fig. 1. Uma outra imagem do veículo desenvolvido pode ser vista na Fig. 2, neste caso, durante testes em piscina. Este ROV (ROVFURG) possui diversos sensores, constituindo-se assim em um suporte experimental importante para a validação de pesquisas teóricas sobre a modelagem matemática (cinemática e dinâmica), bem como sobre o desenvolvimento de leis de controle.
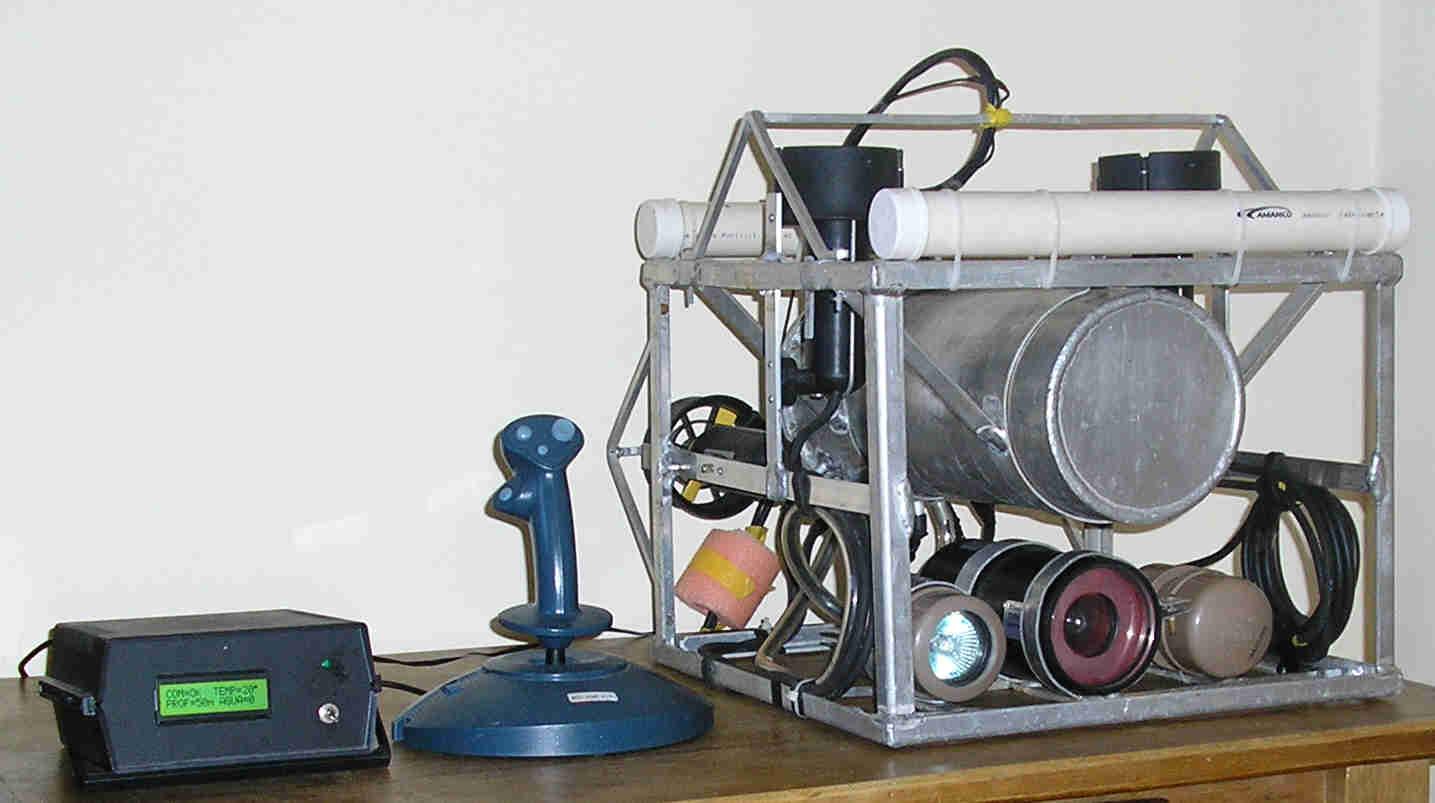
Figura 1. Veículo subaquático desenvolvido no NuMA, para pesquisas sobre modelagem dinâmica e controle de ROVs.
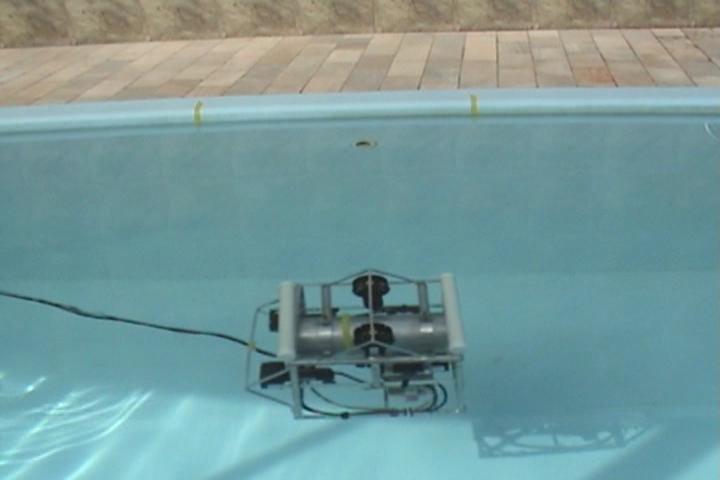
Figura 2. O ROVFURG durante ensaios em piscina.