
O conhecimento de modelos dinâmicos realistas e preditivos para os atuadores robóticos seria de grande auxílio na concepção de leis de controle para robôs manipuladores, principalmente nos casos da robótica de grande precisão ou ainda, para manipuladores com elos flexíveis. Neste projeto desenvolvemos uma estratégia de treinamento e propusemos uma estrutura de Rede Neural Artificial (RNA) para aprender o torque de atrito de um atuador robótico do tipo moto-redutor. Para treinar a rede utilizamos dados experimentais obtidos de um atuador robótico (moto-redutor) do tipo harmonic-drive (Fig. 8), equipado com um encoder para medir a posição angular do rotor. A RNA tem, como entradas, o torque motor e a velocidade rotor, tendo como saída o torque de atrito, o qual foi utilizado na proposição de um mecanismo de compensação do torque de atrito não linear. Os resultados experimentais atestaram a eficiência da estimação do atrito via RNA e da compensação deste com o mecanismo proposto. As figuras 10 e 11 mostram resultados experimentais, com e sem a compensação neural de atrito proposta.
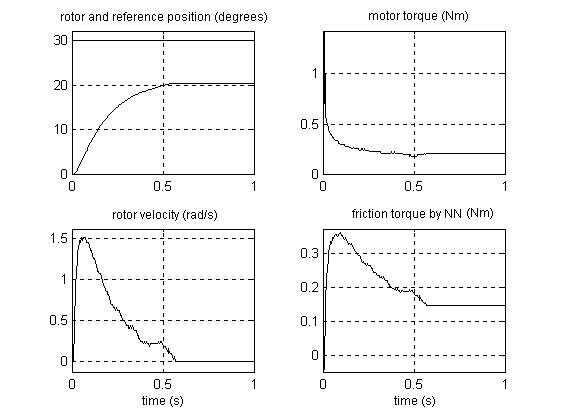 Fig. 10 Controle PD, sem compensação neural.
Fig. 10 Controle PD, sem compensação neural.
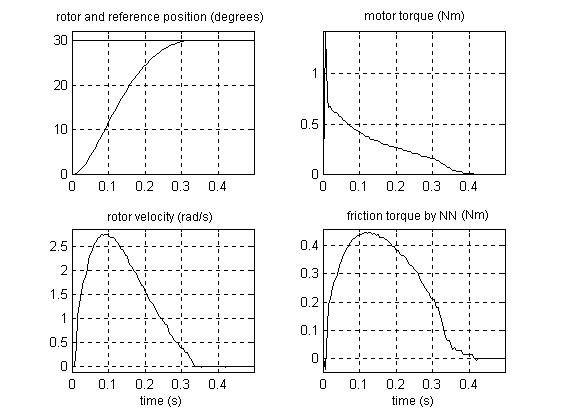
Fig. 11 Controle PD, com compensação neural.