
O controle ativo de robôs flexíveis a partir de atuadores do tipo moto redutores convencionais permanece até então um problema sem solução aceita e com comprovação experimental. Isto se deve à existência de uma zona morta em torque provocada pelos atritos não lineares existentes no interior do atuador. Os torques necessários à atenuação das vibrações, apesar de serem calculados pela lei de controle, são consumidos pelos atritos no interior do atuador, não chegando assim até a estrutura flexível. No presente projeto construímos um robô com um único elo flexível, a fim de validarmos resultados teóricos sobre o controle de vibrações de estruturas utilizando-se atuadores convencionais não lineares. Construímos um manipulador com um único elo flexível no NuMA. Uma foto deste manipualdor pode ser vista na Fig. 7. Trata-se de uma lâmina bastante flexível, feita em alumínio, livre em uma extremidade e preza ao eixo de saída de um atuador do tipo moto-redutor harmonic-drive, na outra extremidade. Quatro sensores fornecem medidas de posição angular: um encoder, solidário ao rotor do atuador e três sensores do tipo strain-gauge, colados ao longo da estrutura. Alguns resultados teóricos já puderam ser testados experimentalmente, como é o caso de um compensador de atritos não lineares que utiliza uma rede neural artificial (RNA) treinada previamente. Uma lei de controle robusto baseada na técnica de alocação de pólos com retorno de estado foi desenvolvida e implementada para funcionar em paralelo ao compensador neural de atritos. Resultados experimentais obtidos com o manipulador flexível atestaram um bom desempenho da lei de controle proposta. Outras leis de controle estão em fase de estudo e projeto atualmente, com vistas a futuras implementações no suporte experimental. Este suporte experimental permite o desenvolvimento de diversas pesquisas teóricas no domínio da modelagem matemática (cinemática e dinâmica) de sistemas flexíveis.
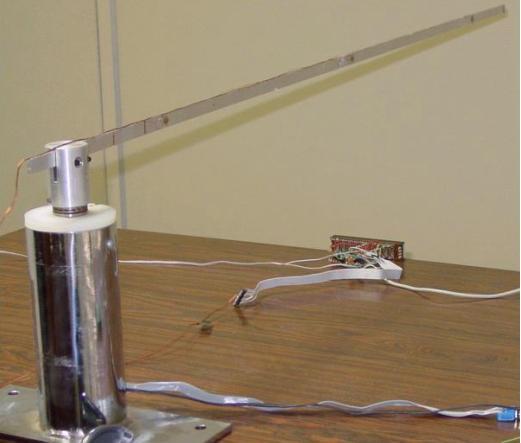
Fig. 7 Robô manipulador flexível.