
Dois grandes problemas dificultam o controle com grande precisão de robôs manipuladores: não linearidades na dinâmica dos atuadores (atritos não lineares) e a obtenção precisa do modelo cinemático inverso. A tomada autônoma de decisões constitui também um problema complexo em robótica. Objetivando lidar com estas três dificuldades em um único projeto, propomos, no presente trabalho, a construção de um robô manipulador dotado de visão artificial para jogar xadrez de forma autônoma. Os algoritmos de controle e tomada de decisão foram desenvolvidos tendo-se como base a simplicidade e a eficiência na solução dos problemas de seguimento de trajetória e processamento de imagens. A redução dos custos do sistema também foi uma das especificações originais do projeto. Para tanto, o sistema foi integramente desenvolvido em no NuMA, inclusive o robô manipulador com seis graus de liberdade (Fig. 6). Este projeto alcançou plenamente seus objetivos originais, estando atualmente em operação com bastante robustez de uma forma geral. Além dos desafios relacionados à robótica e à identificação dos padrões no sistema de visão artificial, tivemos uma motivação extra para a realização deste projeto devido ao envolvimento de diversas áreas do conhecimento nele contidas.
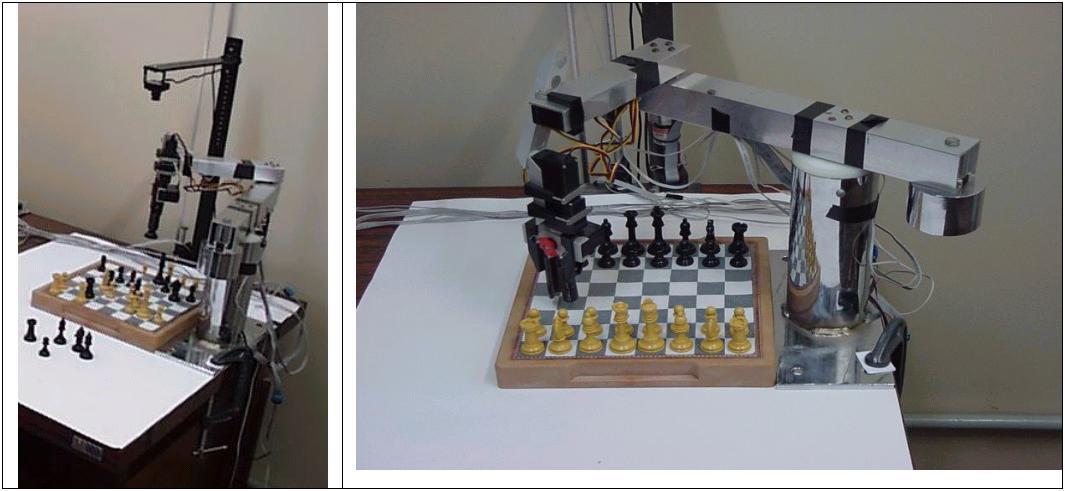
Fig. 6 Sistema robótico para jogar xadrez de forma autônoma.